Ở bài viết Thành lập bản đồ bằng flycam chúng tôi đã giới thiệu về các phương pháp thành lập bản đồ bằng UAV,flycam. Ở bài viết này chúng tôi sẽ giới thiệu đến các bạn chi tiết về 2 bước quan trọng trong quy trình thành lập bản đồ số bằng flycam.
Phantom 4 RTK- thiết bị bay trong quy trình thành lập bản đồ số bằng flycam
Phantom 4 RTK là dòng thiết bị bay mang tính chính xác rất cao nhờ vào sự tích hợp hệ thống định vị trung tâm
Một mô-đun mới được tích hợp trực tiếp vào Phantom 4 RTK cung cấp dữ liệu định vị theo thời gian thực đến mức cm.
Giới thiệu về Phantom 4 RTK
DJI Phantom 4 RTK có nhiều phương pháp bay chụp:
- Kết nối hệ thống định vị này để D-RTK 2 trạm di động.
- NTRIPsử dụng một 4G dongle hoặc WiFi hotspot.
- Hoặc Phantom 4 RTK sẽ lưu trữ dữ liệu quan sát vệ tinh được sử dụng cho Post Processed Kinematics (PPK).
Để tận dụng tối đa các mô-đun định vị Phantom 4 RTK, hệ thống TimeSync mới đã được tạo để liên tục căn chỉnh bộ điều khiển chuyến bay, máy ảnh và mô-đun RTK.
Bên cạnh đó, Timesync đảm bảo rằng mỗi bức ảnh sử dụng các dữ liệu meta chính xác nhất và sửa chữa các dữ liệu vị trí ở trung tâm của CMOS.
Tối ưu hóa kết quả của phương pháp đo ảnh và cho phép hình ảnh để đạt được các dữ liệu định vị xuống mức cm.
Độ chính xác đã được đánh giá:
- Độ chính xác định vị ngang 1cm + 1ppm RTK
- Độ chính xác định vị dọc 1,5cm + 1ppm RTK
- Khi bay ở độ cao 100m, GSD 2,7cm, trời nắng: 5cm.
- Bay trong điều kiện khô ráo, vận tốc gió 4m/s, độ cao 100m và khoảng cách mẫu GSD 2.74 cm, độ phủ ngang 80%, độ phủ dọc 70%
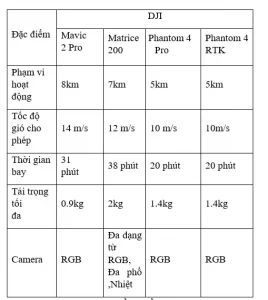
Hình bên dưới so sánh các thông số kỹ thuật chính của Phantom 4 RTK so với các dòng flycam khác của hãng DJI
Mục lục
Agisoft Photoscan– phần mềm xử lý ảnh trong quy trình thành lập bản đồ số bằng flycam
Agisoft PhotoScan là một công cụ xử lý chuyên nghiệp cho ảnh quang học (photogrammetry).
Phần mềm có sẵn với hai phiên bản Standard và Pro, phiên bản tiêu chuẩn đủ cho các tác vụ truyền thống, trong khi phiên bản Pro được thiết kế để soạn thảo nội dung GIS.
Phần mềm được phát triển bởi Agisoft LLC đặt tại St. Petersburg ở Nga.
Agisoft PhotoScan là một phần mềm xử lý ảnh quang học để tạo tự động các sản phẩm như:
- Đám mây điểm dày đặc
- Mô hình đa giác có kết cấu (textured polygonal model)
- Ảnh trực giao và DSM / DTM từ các hình ảnh tĩnh (giao diện hình 2.8).
Nhờ vào công nghệ tiên tiến do Agisoft phát triển
- Phần mềm có thể xử lý rất nhanh (thường trong vòng vài giờ)
- Cung cấp kết quả rất chính xác (lên đến 3cm chụp ảnh trên không và lên đến 1mm cho chụp ảnh tầm gần).

Giao diện phần mềm Agisoft

Gói phần mềm có quy trình làm việc tuyến tính theo dự án trực quan và có thể dễ dàng làm chủ ngay cả bởi một người không chuyên
Trong khi các nhà phân tích ảnh quang học chuyên nghiệp có toàn quyền kiểm soát độ chính xác của kết quả, với báo cáo chi tiết được tạo khi kết thúc xử lý.
Ứng dụng chính của phần mềm Agisoft Photoscan ở các lĩnh vực:
- Khảo sát và lập bản đồ
- Khai thác mỏ
- Nông nghiệp chính xác
- Quản lý môi trường
- Khảo cổ
- Kiến trúc và Di sản văn hóa
- Hiệu ứng hình ảnh và Thiết kế đồ họa trò chơi
Các bước trong quy trình thành lập bản đồ số bằng flycam
Khảo sát thực địa- bước 1 trong quy trình thành lập bản đồ số bằng flycam
Khảo sát thực địa- quy trình thành lập bản đồ số bằng flycam
Khảo sát khu vực là công tác đầu tiên giúp hiểu rõ khu vực tiến hành bay chụp và giúp thiết kế kế hoạch chính xác hơn.
Kết quả thu được là kế hoạch bay chụp hợp lý và tối ưu. Bao gồm các công tác:
- Đầu tiên, chúng tôi tiến hành lập kế hoạch sơ bộ: tuyến đi, khu vực, các thiết bị, dụng cụ cần thiết.
- Sau đó, chúng tôi đi tiền trạm để điều chỉnh lại kế hoạch cho phù hợp.
- Tại thực địa, chúng tôi lên kế hoạch chi tiết cho toàn bộ dự án.
- Ngoài ra, sau khi có kết quả phân tích, chúng tôi tiến hành thực địa kiểm tra kết quả thu được.
Thiết lập và đo tọa độ các điểm khống chế mặt đất, điểm kiểm tra- quy trình thành lập bản đồ số bằng flycam
Chúng tôi thiết lập hệ thống điểm khống chế để căn chỉnh ảnh đúng vị trí.
Ngoài ra, chúng tôi còn thiết lập một số điểm kiểm tra để đánh giá độ chính xác của phương pháp.
Tham khảo thêm các phương pháp thành lập bản đồ bằng UAV

Quy tắc xây dựng là phải phủ đều khu vực và tùy vào diện tích mà phân bố các điểm sao cho hợp lý. Gồm các bước:
- Đầu tiên, chúng tôi lập sơ đồ bố trí dự tính: sử dụng google map và thông tin thu thập từ thực địa xây dựng lưới các điểm GCP và điểm kiểm tra
- Sau đó chúng tôi tiến hành đo tọa độ và cao độ (nếu chưa có) các điểm GCP và điểm kiểm tra.
- Ở đây sử dụng phương pháp đo động thời gian thực (RTK) thiết bị GNSS T300 Plus
Thiết kế phương án bay chụp- quy trình thành lập bản đồ số bằng flycam
Gồm các thông số cần chú ý là độ cao để xác định độ phân giải ảnh, số điểm cần chụp (waypoint) dự kiến dựa trên độ chồng phủ.
Độ cao
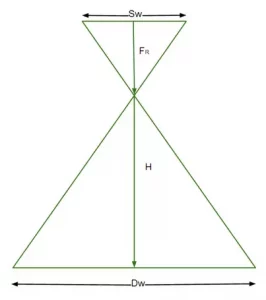
Chiều cao bay chụp có thể được tính toán dựa trên chiều dài tiêu cự của máy ảnh, kích thước cảm biến của máy ảnh và độ rộng của tấm ảnh (hình 3.1).
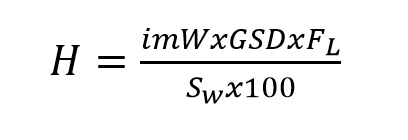
Chiều cao bay chụp được xác định bằng công thức:

Công thức tính chiều cao H Trong đó:
- H là độ cao bay được thiết kế cho UAV (m);
- GSD (Ground Sample Distance) là kích cỡ điểm ảnh cần chụp (cm);
- imW (image width) là độ rộng của ảnh chụp tính bằng pixel;
- FL (focal length) là độ dài tiêu cự của máy ảnh;
- SW (sensor width) là chiều rộng của cảm biến thu nhận ảnh của máy ảnh;

Ảnh hưởng của chiều cao đến vùng thu ảnh Độ chồng phủ
Độ chồng phủ là tỉ lệ chồng lấp theo chiều dài và chiều rộng của tấm ảnh với nhau. Độ chồng phủ càng cao thì dữ liệu càng chi tiết và thời gian xử lý càng lâu
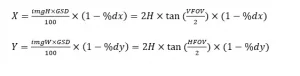
Để xác định số điểm waypoint thì trước tiên cần xác định khoảng cách giữa các điểm waypoint với nhau theo độ phủ dọc và ngang cho trước. Tính toán theo 2 cách:
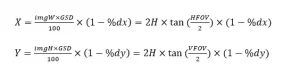
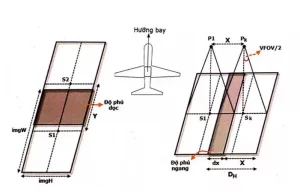
Với Chiều rộng cảm biến vuông góc với hướng bay:


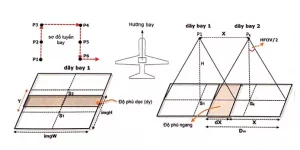
Vùng phủ ảnh khi chiều rộng của cảm biến vuông góc với hướng bay - Với các yếu tố:
- imgW, imgH: chiều rộng và chiêu cao của ảnh (pixel);
- dx, dy: kích thước vùng phủ theo hướng nằm ngang (hướng vuông góc máy bay) và theo hướng dọc (hướng song song với hướng bay) (m);
- H: độ cao bay chụp (m);
- HFOV: góc nhìn ngang của ảnh (trường nhìn ngang của ảnh);
- VFOV: góc nhìn dọc của ảnh (trường nhìn dọc của ảnh);
- X, Y: khoảng cách giữa 2 waypoints theo trục x và trục y trong hệ trục Descartes (m). Trong hình 3.3, X chính là khoảng cách giữa hai dải bay.
Với Chiều rộng cảm biến song song với hướng bay. Tương tự ta thu được:


Vùng phủ của ảnh khi chiều rộng của cảm biến song song với hướng bay Từ các công thức trên, số điểm waypoint cần thiết:

Trong đó:
- X, Y là khoảng cách giữa các waypoints;
- a,b là kích thứớc của khu đo lần lượt theo trục X và Y.
- Trong hình, X chính là khoảng cách giữa hai dải bayTổng số điểm waypoint cho toàn khu vực là:
Tiến hành đo tĩnh- quy trình thành lập bản đồ số bằng flycam
Chúng tôi sử dụng Máy thu GPS 2 tần số T300 Plus đặt cố định vào 1 điểm mốc có tọa độ.
Chúng tôi sử dụng chân ba hoặc sào 3 chân để cố định máy
Kết nối với sổ tay để vào chế độ đo tĩnh của máy
Tiến hành kiểm tra dữ liệu thu được của máy đo sau khi đo tĩnh.

Thiết lập Base phát tĩnh Bay chụp thực địa– quy trình thành lập bản đồ số bằng flycam
Quy trình bay chụp thu thập ảnh bao gồm 4 bước chính:

Quy trinh bay chụp Chuẩn bị thiết bị
Đối với bộ điều khiển từ xa: chúng tôi thiết lập ăng – ten song song với nhau và mở khay cố định màn hình điều khiển và gắn iPad hoặc thiết bị di động vào.
Đối với thiết bị bay DJI Phantom 4 RTK: chúng tôi lắp 4 cánh quạt vào 4 động cơ, lắp pin và tháo bộ khung giữ camera.
Kết nối – Kiểm tra kết nối
Đầu tiên kết nối bộ điều khiển với DJI Phantom 4 RTK trong phần mềm DJI RTK
Tiếp theo, chúng tôi tiến hành kiểm tra kết nối, bao gồm: kiểm tra số lượng vệ tinh, bộ cảm biến, la bàn và IMU,… đến khi xuất hiện “Ready to go” ở góc trái màn hình.
Kiểm tra kế hoạch bay chụp: thiết bị bay, khoảng cách đến khu vực bay, GPS, la bàn và IMU, pin, máy ảnh, thẻ SD, cập nhật kế hoạch bay.
Tiến hành bay chụp tự động
Quá trình bay chụp được thực hiện cho phép UAV tự động bay theo chương trình đã thiết kế
Bao gồm tự động cất cánh, rồi bay đến điểm đầu tiên của dải bay, dừng lại và tiến hành chụp ảnh,
Sau đó tự động bay đến các điểm khác để chụp theo thiết kế đã được tính toán và đã lưu trữ vào phần mềm.
Một khi ảnh cuối cùng được chụp xong, UAV sẽ tự động bay về và hạ cánh tại điểm xuất phát.
Trong quá trình bay chụp, các chỉ số hoạt động của UAV và máy ảnh liên tục được gửi về bộ điều khiển, tùy vào độ an toàn của UAV
Các thông số cần kiểm tra tình trạng năng lượng của pin, nguy cơ va chạm với vật thể, động vật trên không) người điều khiển có thể dừng quá trình bay tự động để UAV hạ cánh.
Khi quá trình bay chụp kết thúc, các ảnh được chuyển từ Micro-SD card của máy ảnh vào máy tính để kiểm tra dữ liệu
Kiểm tra dữ liệu
Dữ liệu ảnh từ Micro-SD card được chuyển sang máy tính cá nhân để thực hiện công tác kiểm tra chất lượng hình ảnh.
Đây là một khâu cực kỳ quan trọng bởi chỉ cần một vài tuyến bay gặp lỗi thì các kĩ sư vận hành phantom 4 rtk phải thực hiện lại quá trình bay chụp
Bởi vì điều này gây ra rất nhiều lãng phí về thời gian và tiền bạc
Các thông số cần kiểm tra là: chất lượng hình ảnh, các khu vục vách, các khu vực có bóng cây.
Nếu chất lượng hình ảnh chưa đạt yêu cầu, chúng tôi sẽ tiến hành bay chụp thu thập dữ liệu lại cho đến khi kết quả đạt yêu cầu.
Bên cạnh đó, chúng tôi sẽ kiểm tra và thay pin cho thiết bị bay.
Công tác trong phòng- Bước 2 trong quy trình thành lập bản đồ số bằng flycam
Bình sai tọa độ tâm ảnh- quy trình thành lập bản đồ số bằng flycam
Trong quá trình bay, cả RTK T300 Plus và Phantom 4 RTK đều thu cùng lúc các tín hiệu vệ tinh GNSS.
Dữ liệu ảnh thu được từ máy bay Phantom 4 RTK bao gồm các tọa độ x,y và z. Tuy nhiên sai số tọa độ ảnh lên tới 5m.
Sử dụng phần mềm chuyên ngành để bình sai tọa độ tâm ảnh
Dữ liệu đầu vào bao gồm:
- Tọa độ trạm base
- OBS file
Tiến hành bình sai dữ liệu bằng teobox. Dữ liệu thu được dạng POS chứa tọa độ tâm ảnh chính xác
Bình sai tọa độ Xử lý dữ liệu trên phần mềm Agisoft Photoscan
Dữ liệu thu thập được sẽ tạo ra ảnh trực giao, mô hình số bề mặt từ sản phẩm cơ bản nhất là đám mây điểm.
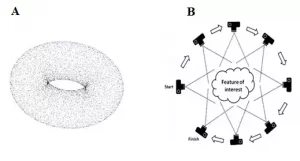
Đám mây điểm được tạo thành bằng phương pháp Structure from Motion.
Đám mây điểm (hình 3.5A) là một bộ dữ liệu số lượng lớn được lưu trữ trong không gian ba chiều.
Đám mây điểm thường được tạo từ máy quét 3D, máy này thu thập một số lượng lớn các điểm nằm trên bề mặt của vật thể.
Đám mây điểm Phần mềm Agisoft Photoscan được sử dụng để xử lý ảnh.
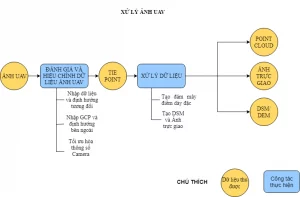
Quy trình xử lý ảnh trên phần mềm Agisoft bao gồm 2 bước chính là đánh giá, hiệu chỉnh dữ liệu ảnh chụp và xử lý dữ liệu như hình dưới:

Quy trình xử lý dữ liệu Đánh giá và hiệu chỉnh dữ liệu ảnh UAV- quy trình thành lập bản đồ số bằng flycam
Để đánh giá và hiệu chỉnh dữ liệu, chúng tôi tiến hành 3 bước nhỏ:
- Nhập dữ liệu ảnh
- Hiệu chỉnh độ sáng cho phù hợp
- Định hướng tương đối hình ảnh bằng toạ độ của UAV khi bay chụp (tuy nhiên độ chính xác không cao).
Tiếp theo, nhập GCP và định hướng bên ngoài để tăng độ chính xác bằng cách tìm và đánh dấu các vị trí GCP trên các tấm ảnh.
Tiếp theo là nhập dữ liệu tọa độ và cao độ của GCP dưới dạng file *.txt..
Cuối cùng, tối ưu hoá thông số Camera để loại bỏ các điểm dị biệt ảnh hưởng đến kết quả cuối.
Xử lý dữ liệu
Đầu tiên, chúng tôi tiến hành xây dựng đám mây điểm dày đặc: tuỳ vào yêu cầu chất lượng và thời gian để lựa chọn chế độ xử lý cao hay thấp.
Sau đó, chúng tôi tiến hành bước xây dựng Mesh: sử dụng thuộc tính Heigh field phù hợp cho xây dựng mô hình của địa hình, đồng thời tối ưu thời gian tinh chỉnh.
Tiếp theo sẽ tiến hành tạo ảnh trực giao, ảnh trực giao được định nghĩa là một bức ảnh lớn đã được tham chiếu địa lý được tạo thành từ các ảnh nhỏ hơn thông qua các phần mềm chuyên dụng.
Tạo mô hình số bề mặt, mô hình số bề mặt (DSM – Digital Surface Model) là sự thể hiện độ cao của bề mặt đất, của tòa nhà, của mực nước ngầm…
Một số dự án khảo sát địa hình bằng UAV chúng tôi đã thực hiện - Khảo sát địa hình tại Lâm Đồng
- Khảo sát địa hình tại Phú Yên
- Khảo sát địa hình tại Quy NhơnNhư vậy, 3dflycam.com đã giới thiệu về quy trình thành lập bản đồ số bằng flycamChúng tôi là công ty khảo sát địa hình chuyên nghiệp, ứng dụng công nghệ uav trong hỗ trợ và cung cấp dịch vụ khảo sát địa hình.Liên hệ hotline 0903353137 để tư vấn nhiều hơn